Loading...
Searching...
No Matches
Public Types |
Public Member Functions |
Public Attributes |
Static Public Attributes |
List of all members
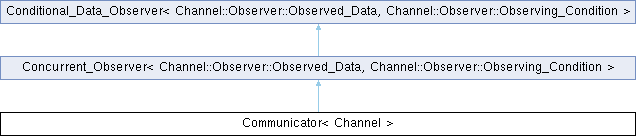
Communicator< Channel > Class Template Reference
#include <communicator.h>
Inheritance diagram for Communicator< Channel >:
Public Types | |
| typedef Concurrent_Observer< typename Channel::Observer::Observed_Data, typename Channel::Observer::Observing_Condition > | Observer |
| typedef Channel::Buffer | Buffer |
| typedef Channel::Address | Address |
| typedef Channel::Port | Port |
| typedef Message< Channel > | Message_T |
 Public Types inherited from Concurrent_Observer< Channel::Observer::Observed_Data, Channel::Observer::Observing_Condition > Public Types inherited from Concurrent_Observer< Channel::Observer::Observed_Data, Channel::Observer::Observing_Condition > | |
| typedef Channel::Observer::Observed_Data | Observed_Data |
| typedef Channel::Observer::Observing_Condition | Observing_Condition |
| typedef Concurrent_Observed< Channel::Observer::Observed_Data, Channel::Observer::Observing_Condition > | Observed |
| Public Types inherited from Conditional_Data_Observer< T, Condition > | |
| typedef T | Observed_Data |
| typedef Condition | Observing_Condition |
| typedef Conditionally_Data_Observed< T, Condition > | Observed |
Public Member Functions | |
| Communicator (Channel *channel, Address address) | |
| ~Communicator () | |
| bool | send (const Message_T *message) |
| bool | receive (Message_T *message) |
| const Address & | address () const |
| void | release () |
| Communicator (const Communicator &)=delete | |
| Communicator & | operator= (const Communicator &)=delete |
| Public Member Functions inherited from Concurrent_Observer< Channel::Observer::Observed_Data, Channel::Observer::Observing_Condition > | |
| Concurrent_Observer (Channel::Observer::Observing_Condition rank) | |
| ~Concurrent_Observer () | |
| void | update (Channel::Observer::Observing_Condition c, Channel::Observer::Observed_Data *d) override |
| Channel::Observer::Observed_Data * | updated () |
| void | detach_signal () |
| Public Member Functions inherited from Conditional_Data_Observer< T, Condition > | |
| Conditional_Data_Observer (Condition c) | |
| virtual | ~Conditional_Data_Observer ()=default |
| virtual void | update (Condition c, Observed_Data *d) |
| const Condition | rank () |
Public Attributes | |
| std::atomic< bool > | _running |
Static Public Attributes | |
| static constexpr const unsigned int | MAX_MESSAGE_SIZE = Channel::MTU |
Additional Inherited Members | |
| Protected Attributes inherited from Conditional_Data_Observer< T, Condition > | |
| Condition | _rank |
| List< T > | _data |
Member Typedef Documentation
◆ Address
| typedef Channel::Address Communicator< Channel >::Address |
◆ Buffer
◆ Message_T
◆ Observer
| typedef Concurrent_Observer<typename Channel::Observer::Observed_Data, typename Channel::Observer::Observing_Condition> Communicator< Channel >::Observer |
◆ Port
| typedef Channel::Port Communicator< Channel >::Port |
Constructor & Destructor Documentation
◆ Communicator() [1/2]
| Communicator< Channel >::Communicator | ( | Channel * | channel, |
| Address | address | ||
| ) |
◆ ~Communicator()
| Communicator< Channel >::~Communicator | ( | ) |
◆ Communicator() [2/2]
|
delete |
Member Function Documentation
◆ address()
| const Communicator< Channel >::Address & Communicator< Channel >::address | ( | ) | const |
◆ operator=()
|
delete |
◆ receive()
◆ release()
| void Communicator< Channel >::release | ( | ) |
◆ send()
Member Data Documentation
◆ _running
| std::atomic<bool> Communicator< Channel >::_running |
◆ MAX_MESSAGE_SIZE
|
staticconstexpr |
The documentation for this class was generated from the following file:
- include/api/network/communicator.h