Loading...
Searching...
No Matches
CAN Class Reference
#include <bus.h>
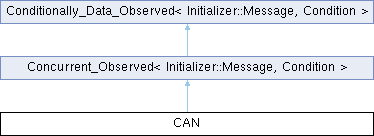
Inheritance diagram for CAN:
Public Member Functions | |
| CAN ()=default | |
| ~CAN ()=default | |
| int | send (Message *msg) |
| bool | notify (Message *buf, Condition c) override |
 Public Member Functions inherited from Concurrent_Observed< Initializer::Message, Condition > Public Member Functions inherited from Concurrent_Observed< Initializer::Message, Condition > | |
| Concurrent_Observed () | |
| ~Concurrent_Observed () | |
| void | attach (Observer *o, Condition c) |
| void | detach (Observer *o, Condition c) |
| virtual bool | notify (Initializer::Message *d, Condition c) |
| Public Member Functions inherited from Conditionally_Data_Observed< T, Condition > | |
| Conditionally_Data_Observed ()=default | |
| virtual | ~Conditionally_Data_Observed ()=default |
| void | attach (Observer *o, Condition c) |
| void | detach (Observer *o, Condition c) |
| bool | notify (T *d, Condition c) |
| bool | notify (T *d) |
Additional Inherited Members | |
| Protected Attributes inherited from Concurrent_Observed< Initializer::Message, Condition > | |
| pthread_mutex_t | _mtx |
| Observers | _observers |
| Protected Attributes inherited from Conditionally_Data_Observed< T, Condition > | |
| Observers | _observers |
Member Typedef Documentation
◆ Address
◆ Message
◆ Observed
◆ Observer
◆ Type
◆ Unit
Constructor & Destructor Documentation
◆ CAN()
|
default |
◆ ~CAN()
|
default |
Member Function Documentation
◆ notify()
◆ send()
The documentation for this class was generated from the following file:
- include/api/network/bus.h